整理有关GUI开发工具RQT相关的插件介绍,用以算法开发初期的测试数据分析。
贵有恒,何必三更起五更眠。
最无益,只怕一日曝十日寒。
rqt简介
RQt是一个图形化用户接口框架,它允许以插件的形式来实现各种图形工具和接口。在RQT中,能够以可停靠窗口的形式来运行存在的GUI工具。可以通过命令“rqt”来运行RQt工具和插件。这个GUI允许你载入并运行任何插件。当然,你也可以以独立窗口的形式运行插件。另外,RViz也被集成到rqt的插件中,这使rqt成为ROS的一个不可缺少的GUI工具。
另外,顾名思义,rqt是基于Qt开发的,而Qt是一个广泛用于计算机编程的GUI编程的跨平台框架,用户可以方便自由地添加和开发插件。
rqt安装与运行
全组件命令安装ROS时,rqt会默认安装。如果未安装“desktop-full”或未安装rqt,请使用以下命令进行安装。1
sudo apt-get install ros-kinetic-rqt*
运行rqt的命令如下。只需键入rqt。作为参考,用户可以使用节点执行命令“rosrun rqt_gui rqt_gui”执行它。
运行rqt将显示rqt的GUI界面,如图所示。如果是第一次,它将只显示菜单,此外没有任何内容。这是因为还没有指定rqt直接运行的插件程序。
rqt的各菜单如下:
- 文件(File) 只有一个退出rqt的子菜单。
- 动作(Running) 显示当前运行的插件,在不需要的时候可以停止。
- 插件(Plugins) 有30多个插件。可以选择并使用它。
- 全景(Perspectives) 用于保存当前运行的插件组,并在下次运行相同的插件组。
rqt插件
如果从rqt的顶部菜单中选择[插件(Plugins)],则可以看到大约30个插件。该插件具有以下功能。大部分是非常有用的rqt的默认插件。非官方的插件也可以添加到此,需要的话用户也可以添加自己开发的rqt插件。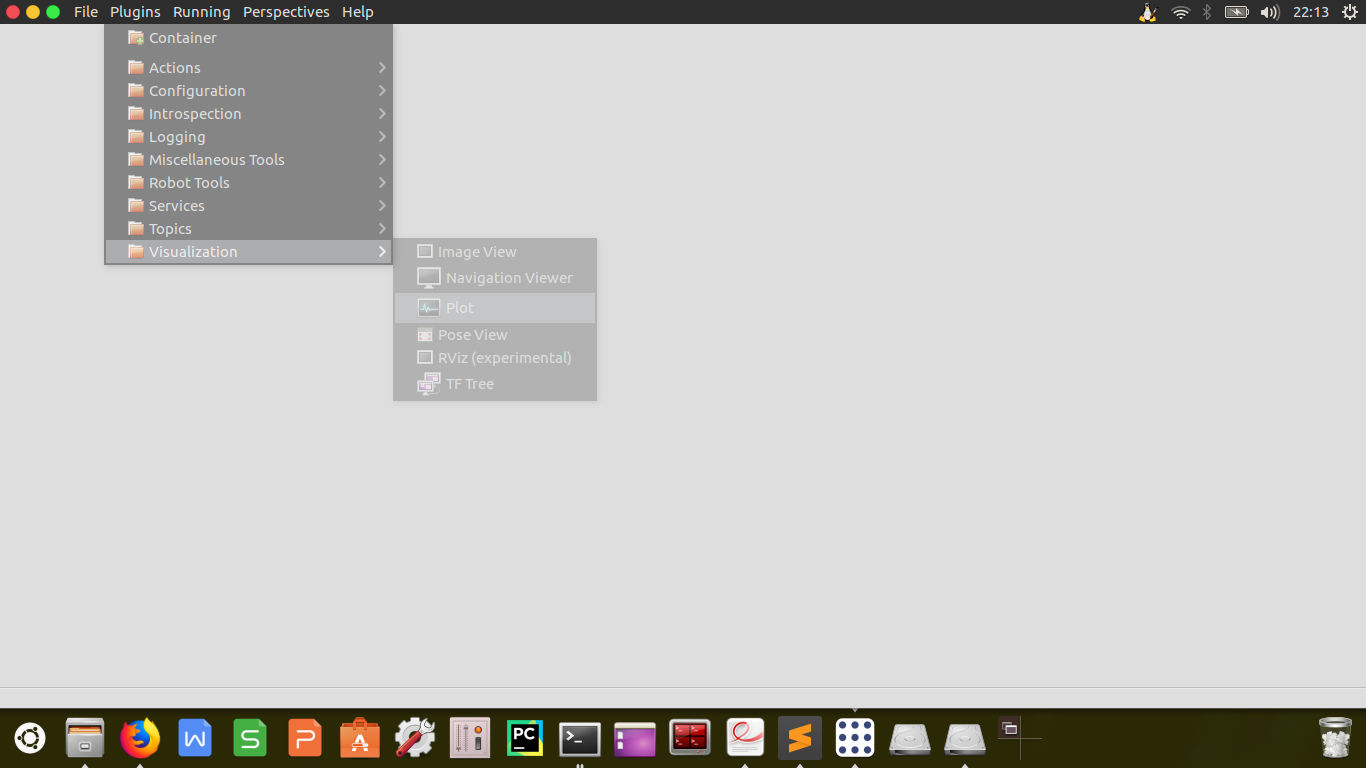
动作(Action)
■ Action Type Browser: 查看动作类型的数据结构的插件。
配置(Configuration)
■ Dynamic Reconfigure: 这是用于更改节点参数值的插件。
■ Launch: roslaunch的GUI插件,当不记得roslaunch的名称或配置时,它非常有用。
自检(Introspection)
■ Node Graph: 一种图形视图类型的插件,可以检查当前运行中的节点间的关系图与消息的流动。
■ Package Graph: 这是一个图形视图插件,显示功能包的依赖关系。
■ Process Monitor: 可以检查当前正在运行的节点的PID(进程ID)、CPU利用率、内存使用情况和线程数。
日志(Logging)
■ Bag: 是一个与ROS数据记录相关的插件。
■ Console: 它是一个允许用户在一个屏幕中查看来自节点的警告(Warning)和错误(Error)等消息的插件。
■ Logger Level: 通过选择负责发布日志的记录器节点来设置Debug、Info、Warn、Error和 Fatal等日志插件。信息(称为记录器级别 )的工具。调试时选择Debug会非常方便。
多种工具(Miscellaneous Tools)
■ Python Console: Python控制台屏幕插件。
■ Shell: 它是一个运行shell的插件。
■ Web: 运行Web浏览器的插件。
机器人工具(Robot Tools)
■ Controller Manager: 这是一个允许用户检查机器人控制器的状态、类型和硬件接口信息插件。
■ Diagnostic Viewer: 这是一个检查机器人设备和错误的插件。
■ Moveit! Monitor: 用于查看运动规划的MoveIt!数据的插件。
■ Robot Steering: 手动控制机器人的GUI工具。在远程控制时,利用此GUI工具进行机器人遥控会非常有用。
■ Runtime Monitor: 它是一个可以实时查看节点中发生的警告或错误的插件。
服务(Services)
■ Service Caller: 它是一个GUI插件,可以连接到正在运行中的服务服务器,并请求服务 。这对测试服务很有用。
■ Service Type Browser: 这是一个用于检查服务类型的数据结构的插件。
话题(Topics)
■ Easy Message Publisher: 这是一个允许用户在GUI环境中发布话题的插件。
■ Topic Publisher: 这是一个可以发布话题的GUI插件。这对话题测试很有用。
■ Topic Type Browser: 这是检查话题类型的数据结构的插件。这对于检查话题类型很有用。
■ Topic Monitor: 这是一个列出当前正在使用的话题,并确认用户选择的话题信息的插件。
可视化(Visualization)
■ Image View: 这是一个可以检查相机的图像数据的插件。这对于简单的照相机数据测试非常有用。
■ Navigation Viewer: 这是一个用于在导航中检查机器人的位置和目标点的插件。
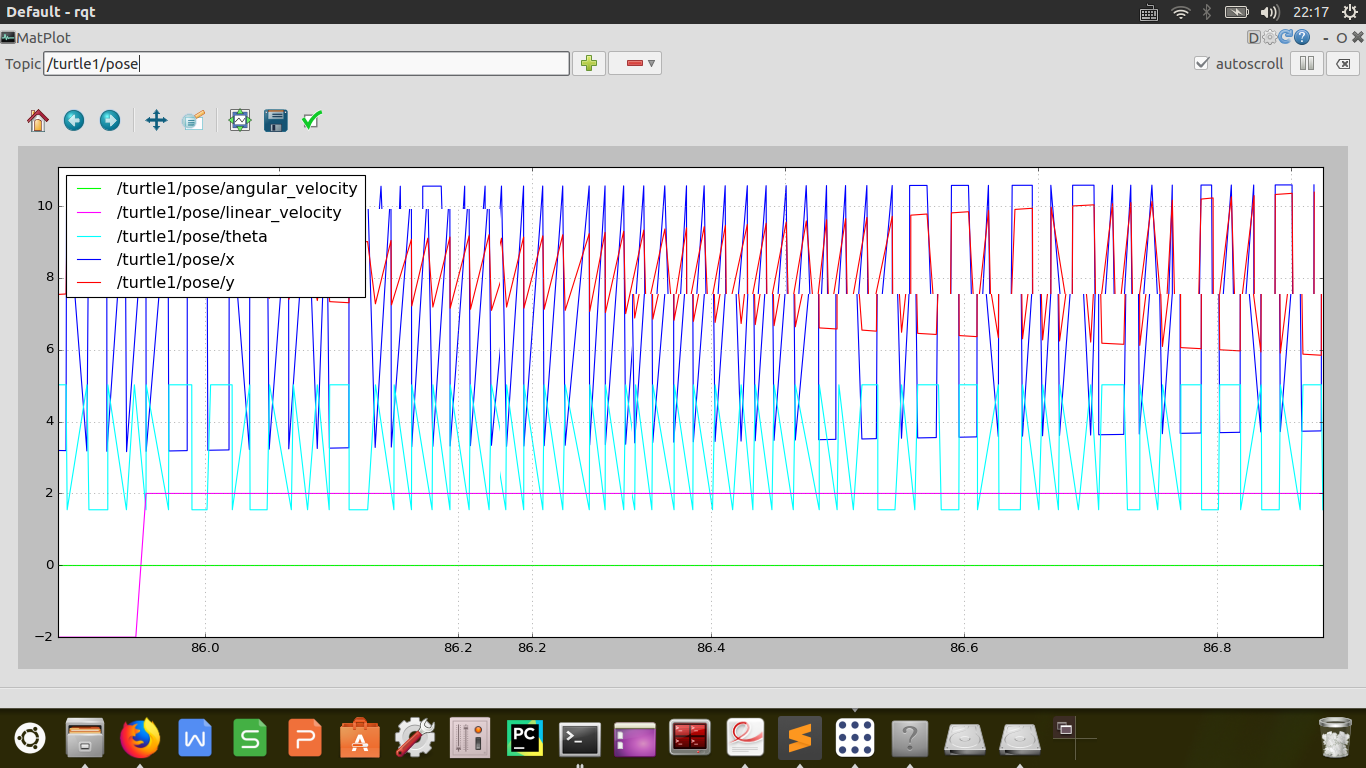
■ Plot: 这是一个绘图二维数据的GUI 插件。这对于二维数据绘图非常有用。
■ Pose View: 它是一个显示机器人模型和TF的姿态(pose,位置和方向)的插件。
■ RViz: 这是RViz插件,是一个3D可视化工具插件。
■ TF Tree: 这是一个图形视图插件,它用树形图显示了通过TF收集的每个坐标之间的关系。