利用SIFT检测器对交通标志牌进行匹配检测,控制TB3完成相应的任务动作!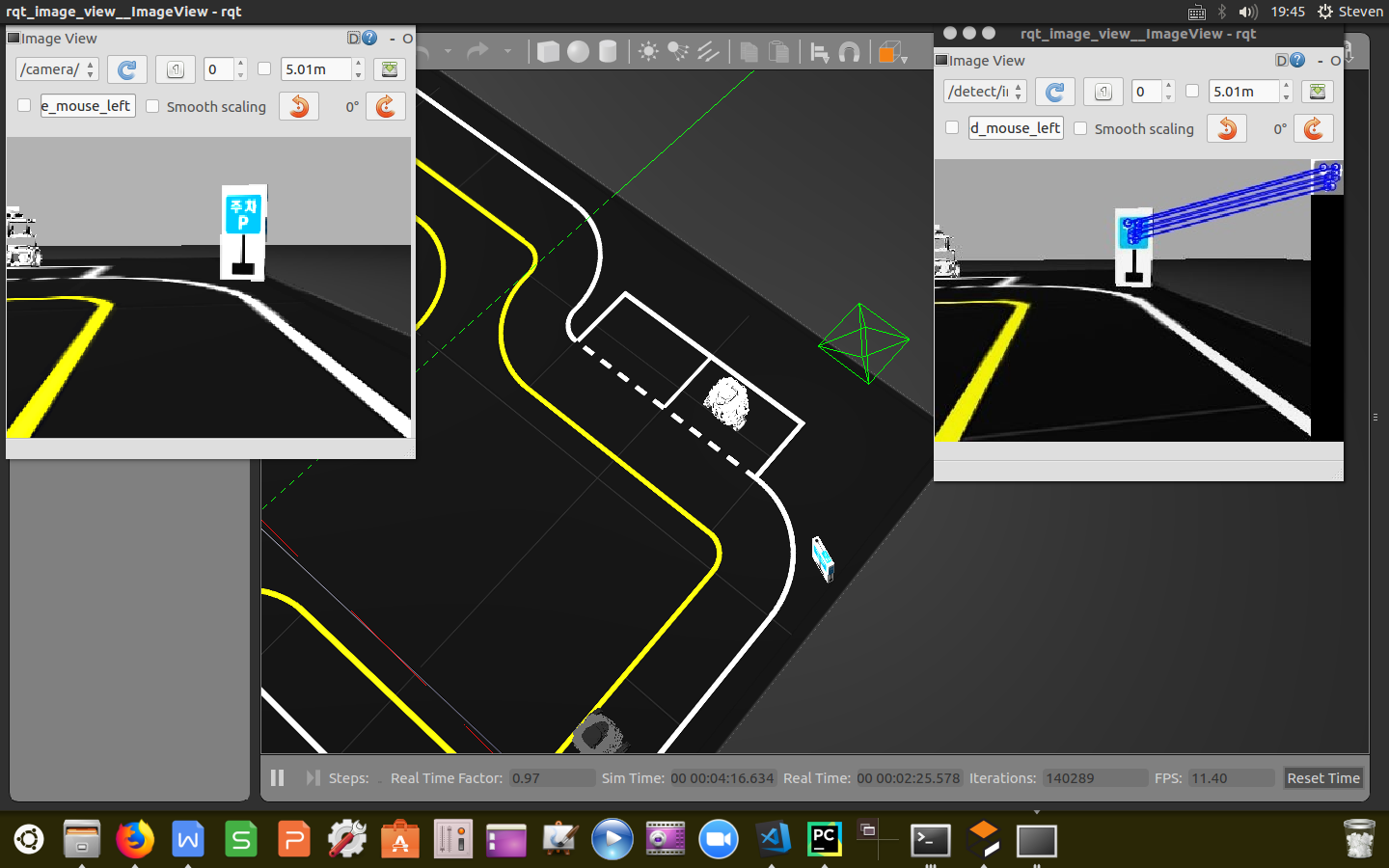
谦卑并不意味着多顾他人少顾自己,
也不意味着承认自己是个无能之辈,
是意味着从根本上把自己置之度外。
订阅话题
同车道线检测《TB3_Autorace之信号灯检测》程序一样,我们这里接收未经透视变换的原始图像信息/detect/image_input1
2
3
4
5
6
7
8
9self.sub_image_type = "raw"
self.pub_image_type = "compressed"
if self.sub_image_type == "compressed":
# subscribes compressed image
self.sub_image_original = rospy.Subscriber('/detect/image_input/compressed', CompressedImage, self.cbFindTrafficSign, queue_size = 1)
elif self.sub_image_type == "raw":
# subscribes raw image
self.sub_image_original = rospy.Subscriber('/detect/image_input', Image, self.cbFindTrafficSign, queue_size = 1)
发布话题
发布检测到的路标信息,用以控制TB3机器人执行相应的动作。1
2
3
4
5
6
7
8self.pub_traffic_sign = rospy.Publisher('/detect/traffic_sign', UInt8, queue_size=1)
if self.pub_image_type == "compressed":
# publishes traffic sign image in compressed type
self.pub_image_traffic_sign = rospy.Publisher('/detect/image_output/compressed', CompressedImage, queue_size = 1)
elif self.pub_image_type == "raw":
# publishes traffic sign image in raw type
self.pub_image_traffic_sign = rospy.Publisher('/detect/image_output', Image, queue_size = 1)
设定检测状态
这里我们利用python的枚举操作将路标检测封装为几个不同状态,包括停车、泊车、隧道三个路标信息。根据不同路标指示执行相应的动作。1
2
3
4self.TrafficSign = Enum('TrafficSign', 'divide '
'stop '
'parking '
'tunnel')
特征点匹配
初始化一个SIFT检测器,读取存储的路标信息,利用SIFT提取图片的关键点和特征符,通过FlannBasedMatcher算法(二维特征点匹配)进行近似匹配得到self.flann值。代码封装如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20def fnPreproc(self):
self.sift = cv2.xfeatures2d.SIFT_create()
dir_path = os.path.dirname(os.path.realpath(__file__))
dir_path = dir_path.replace('turtlebot3_autorace_detect/nodes', 'turtlebot3_autorace_detect/')
dir_path += 'file/detect_sign/'
self.img2 = cv2.imread(dir_path + 'stop.png',0) # Image1
self.img3 = cv2.imread(dir_path + 'parking.png',0) # Image2
self.img4 = cv2.imread(dir_path + 'tunnel.png',0) # Image3
self.kp2, self.des2 = self.sift.detectAndCompute(self.img2,None)
self.kp3, self.des3 = self.sift.detectAndCompute(self.img3,None)
self.kp4, self.des4 = self.sift.detectAndCompute(self.img4,None)
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 50) #指定递归遍历的次数。值越高结果越准确,但是消耗的时间也越多
self.flann = cv2.FlannBasedMatcher(index_params, search_params)
均方差计算
计算单应性矩阵的均方差用以判断是否寻找到目标。代码封装如下:1
2
3
4
5
6def fnCalcMSE(self, arr1, arr2):
squared_diff = (arr1 - arr2) ** 2
sum = np.sum(squared_diff)
num_all = arr1.shape[0] * arr1.shape[1] #cv_image_input and 2 should have same shape
err = sum / num_all
return err
路标检测
将帧率设置成10fps,将图像格式转换成OpenCV格式,设定最小匹配数来决定是否开始寻找目标,设定最小均方差值。利用Flann单应性检测器对图像中的信息和存储的图像信息进行匹配,返回一个训练集和询问集。我们创建一个数组来存储匹配后得到的训练集成员,如果匹配得到的训练集成员个数大于设定的最小匹配数,就开始寻找目标。
提取匹配的对应点的坐标信息,计算3x3映射矩阵(单应性矩阵H)对图像进行矫正,并计算矩阵的均方差,若均方差小于设定的均方差值,则说明图像匹配成功,检测到路标。将匹配上的特征点连接并标识在图像上,发布交测到的路标信息。代码封装如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73def cbFindTrafficSign(self, image_msg):
if self.counter % 3 != 0:
self.counter += 1
return
else:
self.counter = 1
if self.sub_image_type == "compressed":
np_arr = np.fromstring(image_msg.data, np.uint8)
cv_image_input = cv2.imdecode(np_arr, cv2.IMREAD_COLOR)
elif self.sub_image_type == "raw":
cv_image_input = self.cvBridge.imgmsg_to_cv2(image_msg, "bgr8")
MIN_MATCH_COUNT = 9
MIN_MSE_DECISION = 50000
# find the keypoints and descriptors with SIFT
kp1, des1 = self.sift.detectAndCompute(cv_image_input,None)
matches2 = self.flann.knnMatch(des1,self.des2,k=2)
matches3 = self.flann.knnMatch(des1,self.des3,k=2)
matches4 = self.flann.knnMatch(des1,self.des4,k=2)
image_out_num = 1
good2 = []
for m,n in matches2:
if m.distance < 0.7*n.distance:
good2.append(m)
if len(good2)>MIN_MATCH_COUNT:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good2]).reshape(-1, 1, 2)
dst_pts = np.float32([self.kp2[m.trainIdx].pt for m in good2]).reshape(-1, 1, 2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask2 = mask.ravel().tolist()
mse = self.fnCalcMSE(src_pts, dst_pts)
if mse < MIN_MSE_DECISION:
msg_sign = UInt8()
msg_sign.data = self.TrafficSign.stop.value
self.pub_traffic_sign.publish(msg_sign)
rospy.loginfo("TrafficSign 2")
image_out_num = 2
else:
matchesMask2 = None
if image_out_num == 1:
if self.pub_image_type == "compressed":
# publishes traffic sign image in compressed type
self.pub_image_traffic_sign.publish(self.cvBridge.cv2_to_compressed_imgmsg(cv_image_input, "jpg"))
elif self.pub_image_type == "raw":
# publishes traffic sign image in raw type
self.pub_image_traffic_sign.publish(self.cvBridge.cv2_to_imgmsg(cv_image_input, "bgr8"))
elif image_out_num == 2:
draw_params2 = dict(matchColor = (0,0,255), # draw matches in green color
singlePointColor = None,
matchesMask = matchesMask2, # draw only inliers(内对)
flags = 2)
final2 = cv2.drawMatches(cv_image_input,kp1,self.img2,self.kp2,good2,None,**draw_params2)
if self.pub_image_type == "compressed":
self.pub_image_traffic_sign.publish(self.cvBridge.cv2_to_compressed_imgmsg(final2, "jpg"))
elif self.pub_image_type == "raw":
self.pub_image_traffic_sign.publish(self.cvBridge.cv2_to_imgmsg(final2, "bgr8"))
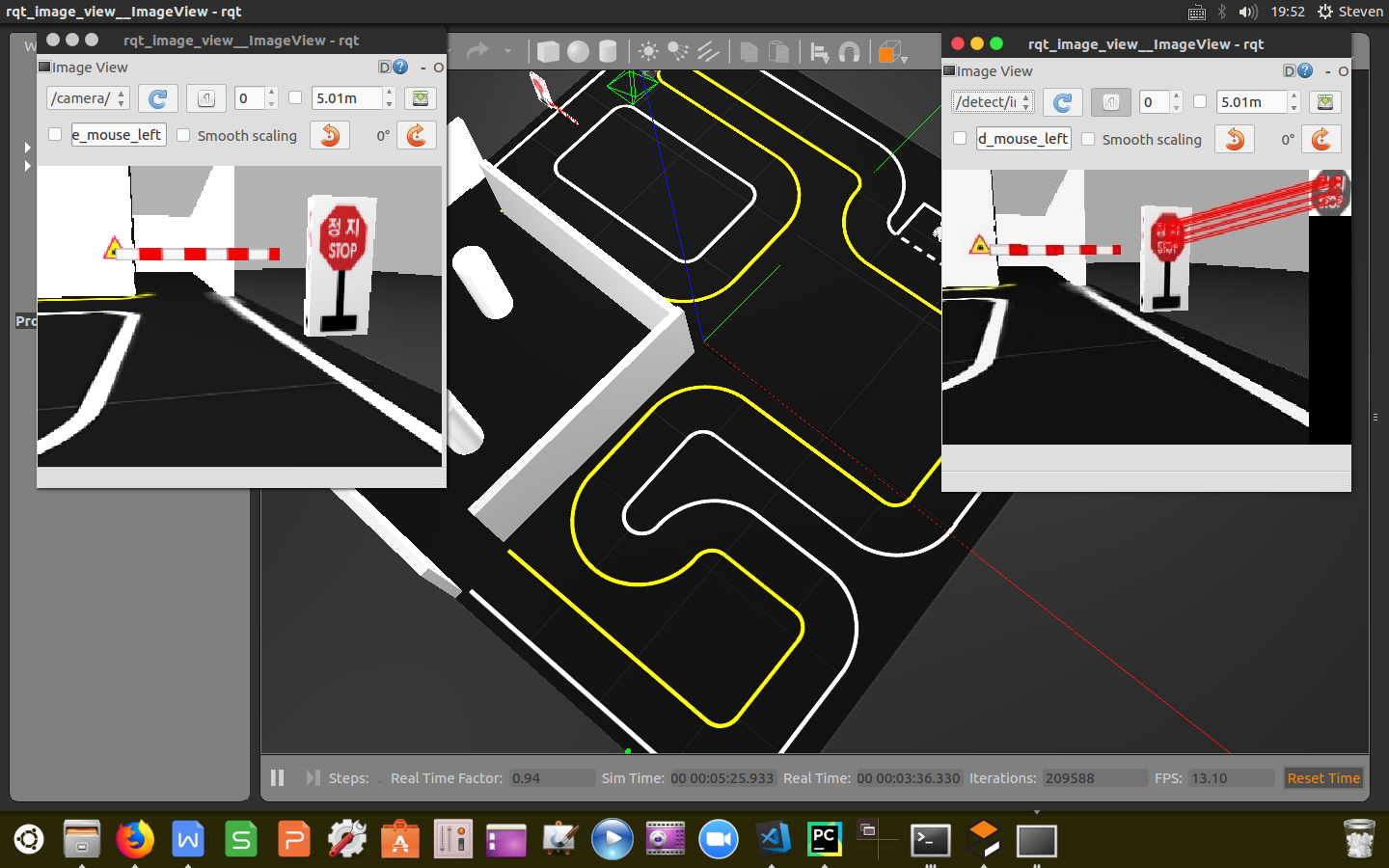
至此,已完成所有交通标志牌检测任务!